自動運転車のハッキングを防げ!
完全自動運転に向け実証実験中
人間は優秀である一方で時に信じられないほど幼稚なミスを犯してしまいます。そしてそれは自動車の運転時に取り返しのつかない結果をもたらします。
2021年における日本の交通事故死亡者数は2,636人で負傷者数は361,768人に登ってしまいました。このような被害を減らすため、完全自動運転の実現に向け様々な企業・研究機関が世界中で研究と実証実験を行っています。数年以内にはこの記事を読んでいる皆さんも試乗車に乗る機会があるのではないでしょうか。
高精度化する3Dセンサ
近年自動運転技術が急速に進化したのは認識AIの発展に加え、3Dセンサの高精度化も大きな貢献を果たしており、高精度な3Dデータが得られるLiDAR(Light Detection and Ranging)センサが大きな役割を果たしています。LiDARセンサは自動運転車がどの車線にいるか判定する自己位置推定に加え、周囲の車・歩行者を検出する物体検出といった自動運転の中核的機能に使用されています。
◇LiDARセンサデータの例:まるでCGのような車両周辺の高精度3Dデータが得られます。
https://www.youtube.com/watch?v=O7fKgZQzkEo
LiDARセンサの脆弱性が突かれる
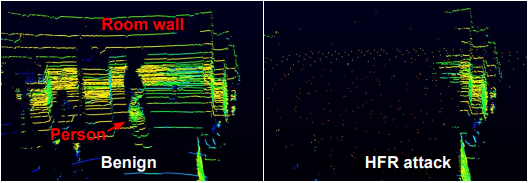
一方で、このようなLiDARセンサの脆弱性を突きハッキング(攻撃)するセンサ幻惑(sensor spoofing)攻撃が実証され、自動運転車への大きな脅威になっています。このような攻撃を悪用することで、様々な事故をハッカーが起こせるかもしれません。例えば自動運転車の眼の前に壁が現れたかのように誤認させ急ブレーキを誘発し事故を起こしたり、横断歩道上の歩行者を見えなくして衝突事故を誘発したり、といった人命に関わる脅威が考えられます。
LiDARは自身がレーザパルスを放出し、車などの対象物にレーザが当たって反射するまでの飛行時間(time-of-flight)を計測することで距離を測っています。光速Cで飛行時間がtならばC*t/2で対象物までの距離がわかりますね。センサ幻惑攻撃は外部から偽のレーザをLiDARに照射し、この測定結果を上書きすることで計測を騙します。現行のLiDARはこのような攻撃を想定して作られていないため、様々な脅威に晒されてしまいます。 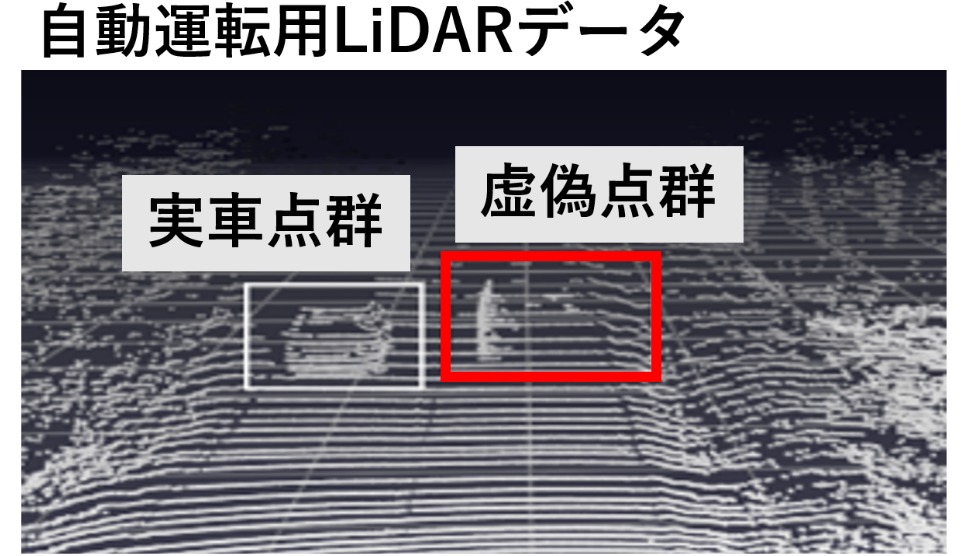
元画像:Hallyburton et al, “Security Analysis of Camera-LiDAR Fusion Against Black-Box Attacks on Autonomous Vehicles“, USENIX Security 2022.
元画像:Sato et al, “LiDAR Spoofing Meets the New-Gen: Capability Improvements, Broken Assumptions, and New Attack Strategies”, NDSS 2024.
安心安全な自動運転社会へ
一度でもこのような事故が起きると誰も自動運転車を使おうとは思わないでしょう。そのため、僕の研究室ではこういった自動運転車への攻撃を防ぐセキュリティ研究を行っています。例えばセンサの新たな脆弱性の発見やハッキングを防ぐセンサ構造などを考えることで、安心安全な自動運転社会の実現を目指しています。
僕は高校生の頃はエレキギターをやっており、エフェクター(ギターの音色を変化させる回路)の制作から電子回路やセンサに初めて興味を持ちました。またゲーム用の自作PCを通じて色々なコンピュータの部品(CPU,DRAM,HDD)に興味を持ち、大学で回路設計を行いたいと志すに至りました。
回路設計やセンサはあまり身近でないトピックですが、生活には欠かせない技術です。まずは趣味の延長から入ってみるのも良いかもしれません。

攻殻機動隊 STAND ALONE COMPLEX
監督 : 神山健治
この名作アニメに登場する“笑い男事件”は自身の顔を“笑い男マーク”に上書きする、というサイバーテロでした。センサデータを上書きして騙す、という点で本研究と似ていますね。
3月のライオン
羽海野チカ(ヤングアニマルコミックス)
若いプロ棋士が主人公の漫画。プロの生き様について描いた傑作だと思います。

MASTER KEATON
浦沢直樹(ビッグコミックススペシャル)
主人公は、保険調査員でもある、考古学の研究者。研究者の生き様が描かれており、上記の本同様に傑作だと思います。
Google's driverless car
TED
トップ自動運転企業であるWaymoの原型となったDARPA Challengeをリードしたスタンフォード教授のSebastian ThrunのTED講演です。
[webサイトへ]