私のとなりのロボットなヒト 理系女子がロボット系男子に聞く
瀬戸文美 、編集:千葉工業大学未来ロボット技術研究センター(近代科学社)
ロボット大好きな著者がインタビューから引き出した、9人のロボット研究者とそれぞれの研究分野の魅力が丁寧な脚注とともに記されています。
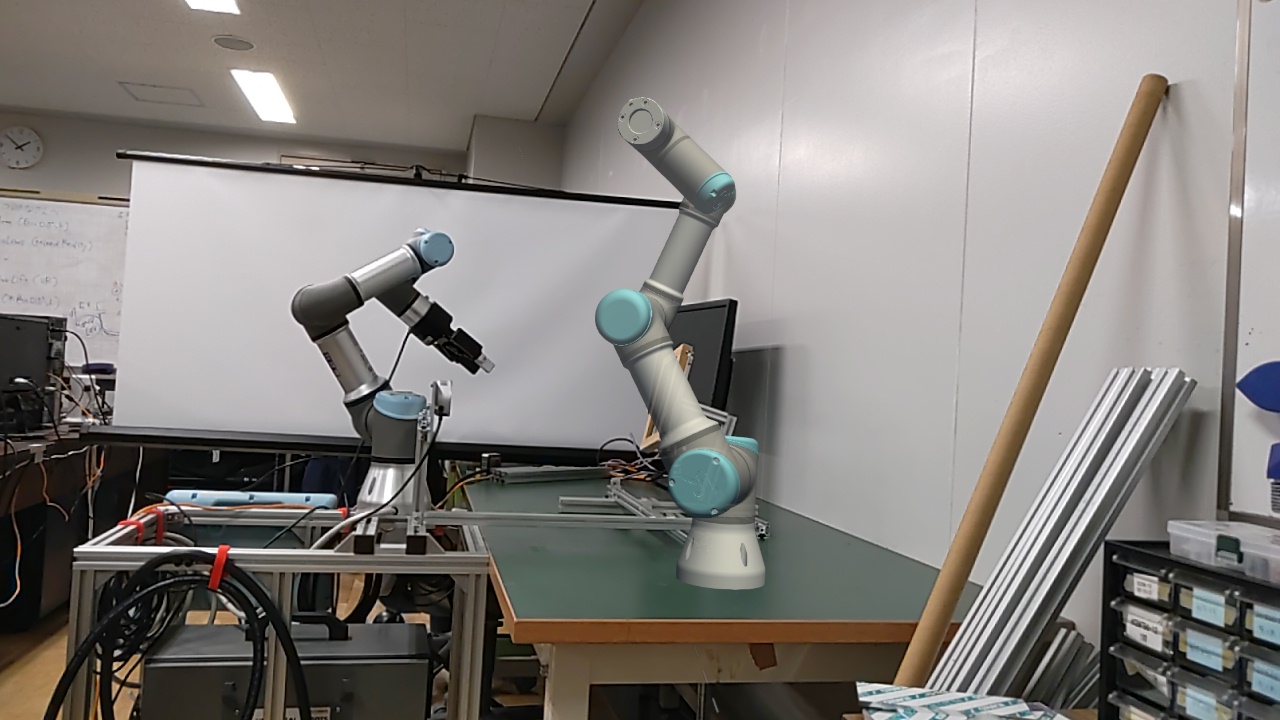
「力学的+幾何学的」に安定して物を持つロボット
持つとき、運ぶとき 人が想定するように
手でマグカップを持って運ぶことを想像してください。みなさんはどのように持っていますか?マグの取っ手に指をひっかけている人もいれば、側面を指ではさんでいる人もいるでしょう。運ぶときはどうですか?そのまま持って運ぶ人もいれば、反対の手を底面に添えている人もいるようです。
人間が物を持つとき、運ぶときには、地球上で働く重力によって落下することを防ぐことはもちろん、さまざまなシチュエーションを想定していることが多いです。手を添えて物を運ぶことは、不意に手を滑らせてしまう状況を想定したものでしょうか。
私はロボットが物を掴んだり運んだりするときにも同じように、安心感をもたらす手法が有用であると考えています。特に、物体を持つ(把持する)ときの、力学的な手法と幾何学的な手法を統一的に扱う方法に取り組んでいます。
両者の特長を組み合わせて
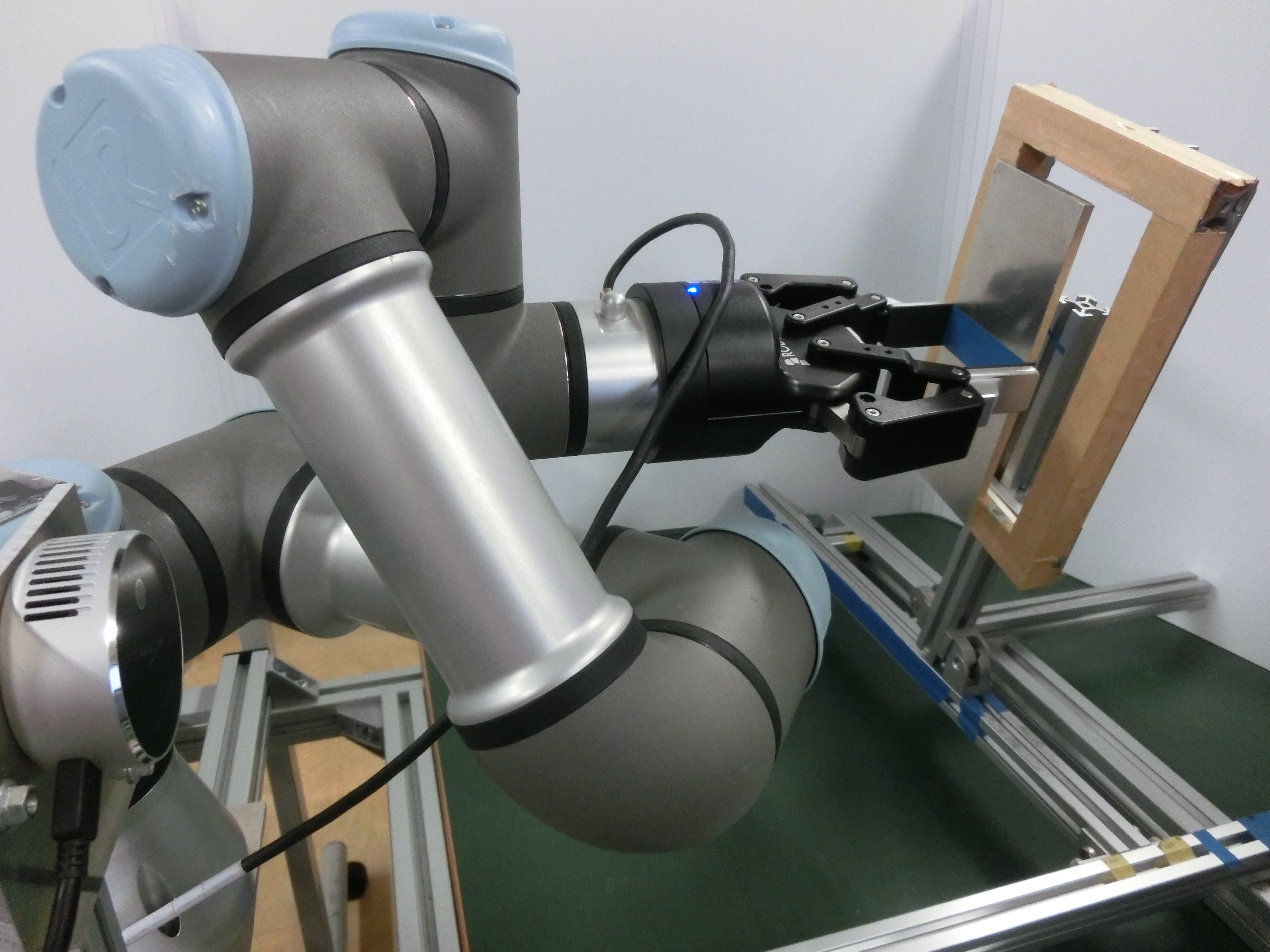
地球上で物体を持つときに落とさないようにするためには、物体に働く重力に対抗する力を加えることを「力学的に」考える必要があります。もしくは力に頼らず鳥かごやネットのように、物体が通り抜けられないような障害物の配置を「幾何学的に」考えるのも良いです。
これまでのロボティクス(ロボット工学)では、このどちらか一方に注目してロボットの動きを決定する方針がほとんどでした。私はそれぞれが持つ特長を組み合わせて、ロボットがする物体操作がより信頼できるものになるような方策を考えています。
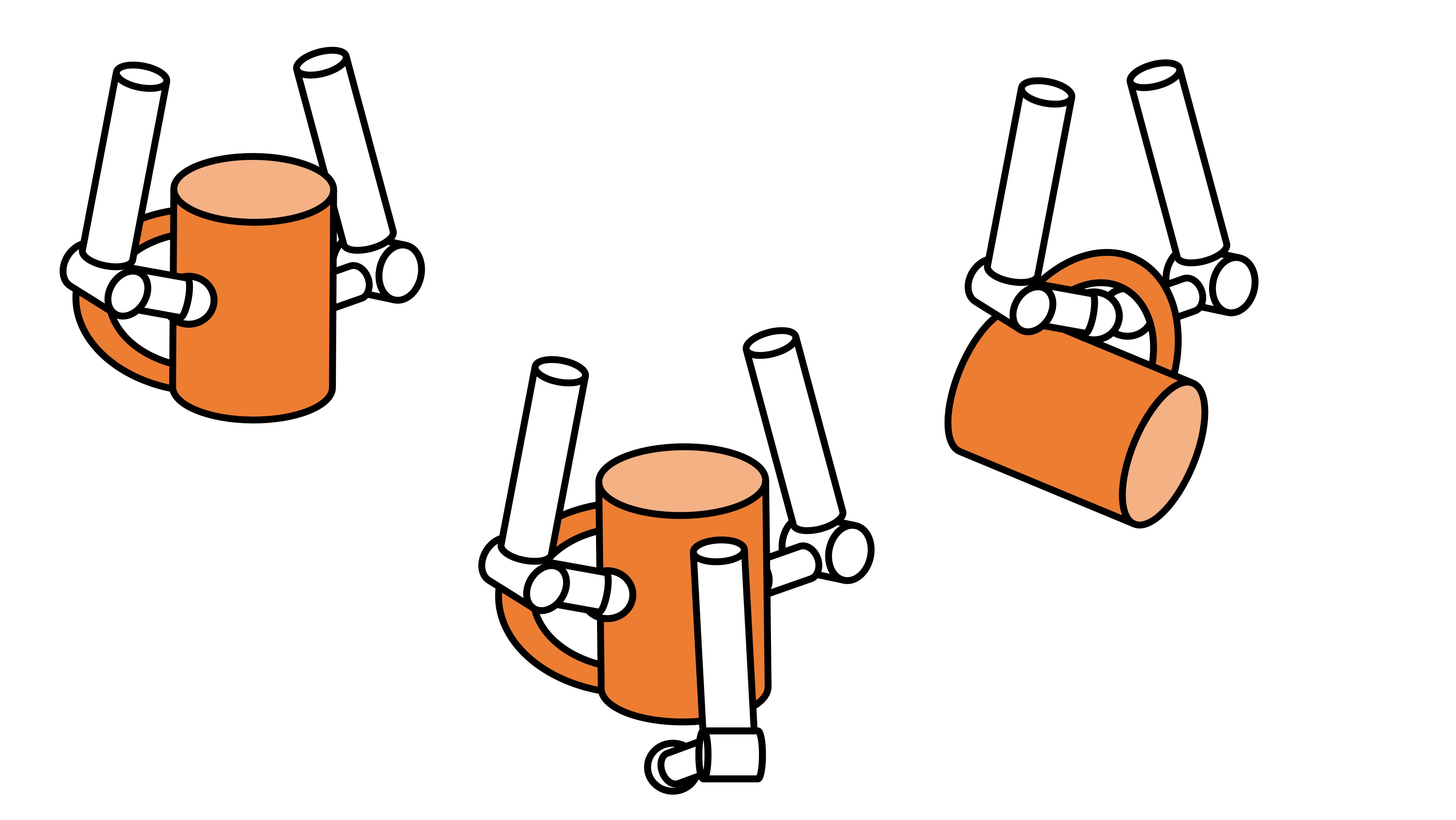
「幾何拘束と力学拘束の両方を等しく評価する物体操作の安定性指標と動作計画への利用」
◆主な業種
(1) 一般機械・機器、産業機械(工作機械・建設機械等)等
(2) 電気機械・機器(重電系は除く)
(3) 自動車・機器
◆主な職種
(1) 設計・開発
(2) 保守・メインテナンス・維持管理、運用・システムアドミニストレータ・サービスエンジニア
(3) 技術系企画・調査、コンサルタント
このロボットがすごい
ロボットは「人工的に作られた動く何か」だと思っています。人が作って動かすために必要なことだけでなく、人間社会の中で動くために守るべきルールもあります。そういった背景からロボティクス(ロボット工学)は広範囲にわたるいろいろな学問と融合し、その組み合わせの上に成り立っています。
ロボットや機械というものをどうやって形にするのか、どのように動かすのか、もっと高度で知能的に機能させるためには何が必要なのか。それらを知り、たくさんのアイデアを生み出し、想像を具現化する能力を持つ人たちが多くなれば、ロボット技術はさらに発展・普及できると期待しています。
[webサイトへ]

アイアンバディ
左藤真通(モーニング KC)
二足歩行ロボットを通じて、ロボットコンテスト(ロボコン)やベンチャー会社の起業などのリアルな雰囲気を追体験できて楽しいです。

無駄なマシーンを発明しよう! 独創性を育むはじめてのエンジニアリング
藤原麻里菜、監修:ニャンパス株式会社 登尾徳誠(技術評論社)
人の役に立つロボットを作ろう!と思っている人もそうでもない人も、何か動くものを作りたいと思ったときに読んで作る本。
| Q1.18才に戻ってもう一度大学に入るならば、学ぶ学問は? 数学 |
|
| Q2.研究以外で、今一番楽しいこと、興味を持ってしていることは? 生成AI、VR、スケートボード |
|
| Q3.好きな言葉は? 迷うならやればいい。やりたいと思わなければそもそも迷わない。 |