
第5回 求めた回避軌道計算で実際に運転してみたら
ハンドル操作を数値化する
回避軌道の半径と中心角が求められたら、そこからハンドルをどう操作すればいいかを計算します。この方法を簡単に説明します。
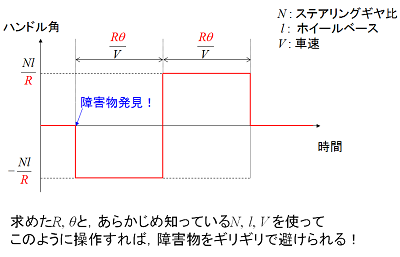
横軸が時間、縦軸がハンドル角です。最初まっすぐ走っているのでハンドルは0です。障害物を発見したら、避けためにハンドルを操作しますが、どれだけハンドルを切ればいいかは、以下の簡単な式でだいたい求められます。

N はステアリング(ハンドル)のギア比、l はホイールベース(前輪軸と後輪軸の距離)のことです。これらは、クルマを作った時点で決まっている数値です。
ハンドルをどれだけの時間切っていればいいかは、これも、先ほど求めた R と θ を掛け算して、今のクルマのスピード(車速)V で割った時間の分だけということになります。( Rθ で円弧の長さになる)

マイナス側が右に切るということを表しています。最初、この

という量だけ右に切って、右に切ったまま、その角度を一定に保ちます。そして、

最初に成功の喜びを味わうのは
このように意外と簡単な高校数学で、障害物を避ける問題は解くことができますが、高校とは違い、問題を解いただけでは終わらないのが大学、大学院です。


この写真は、私たちが障害物をギリギリで避けるのに初めて成功した時、撮影されたものです。ミラーに注目してください。段ボールをすれすれで避けているのがわかると思います。この当時は、まだ歩行者のように動いて飛びだす障害物には対応していなかったため、車両の前に段ボールを落とすことで突然飛び出してくる歩行者を模擬しました。ちなみに、この段ボールを落としているのは、当時大学4年の学生で、クルマに乗っているのは、当時大学院2年の学生です。「できた」「うれしい」という瞬間は、私たち教員より先に、研究に参加した学生の方が味わうということも多いです。
つづく
第6回 林先生インタビュー
<前回を読む>
第4回 回避軌道を“数学的に”求めよう
